Reinforcement Learning
Terms in RL
Q-Learning
chatbot
Q-learning is a model-free reinforcement learning algorithm used to inform an agent on how to act optimally in a given environment to achieve its goal. It does so by learning the value of actions in states, without requiring a model of the environment. This is akin to how humans and animals learn to make decisions based on the outcomes of their actions, adjusting their behavior to maximize rewards over time.
Core Concepts:
- Agent: In the context of Q-learning, the agent is analogous to an individual in cognitive science, making decisions based on the information available and their experiences.
- Environment: This is the context or the world in which the agent operates. It includes all the states the agent can be in and the actions it can take.
- States: These are the specific conditions or situations the agent finds itself in within the environment.
- Actions: In each state, the agent can perform various actions to transition from one state to another.
- Rewards: After taking an action, the agent receives a reward (or punishment), which is a feedback mechanism similar to reinforcement in cognitive and behavioral science. This reward helps the agent learn which actions are beneficial towards achieving its goal.
The Q-Learning Algorithm:
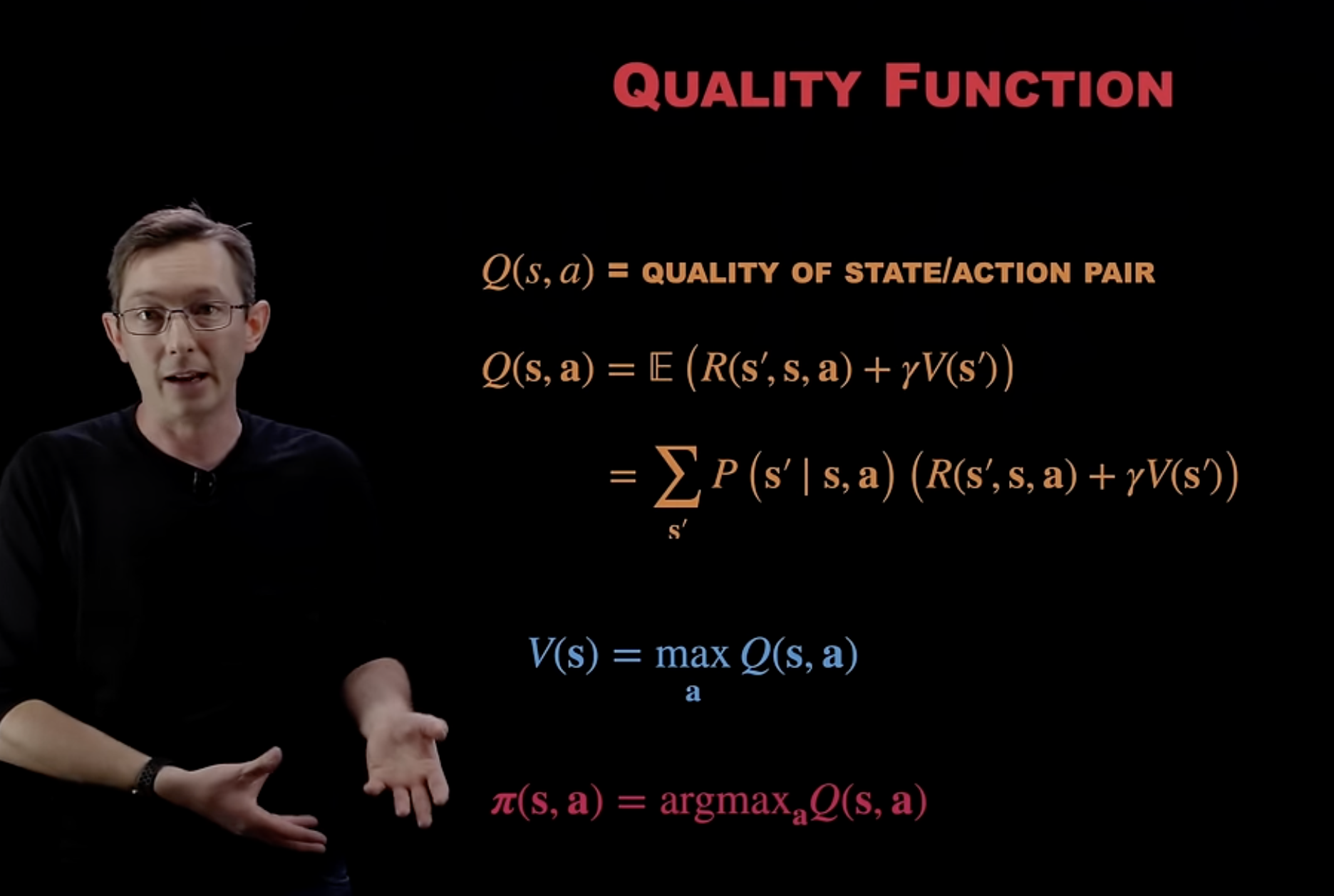
The heart of Q-learning is the Q-function, Q(s, a), which estimates the value of taking action (a) in state (s). This value represents the total amount of reward an agent can expect to accumulate over the future, starting from state (s) and taking action (a), followed by an optimal policy of actions thereafter.
The Q-function is updated as follows:
Where:
- (s) is the current state.
- (a) is the current action.
- (s’) is the new state after taking action (a).
- (r) is the reward received after taking action (a).
- (\alpha) is the learning rate, determining how much new information overrides old information.
- (\gamma) is the discount factor, which balances the importance of immediate and future rewards.
Cognitive Science Perspective:
From a cognitive science perspective, Q-learning can be seen as a computational model of how learning and decision-making might occur through the process of trial and error, and how rewards shape future behavior. It aligns with the concept of operant conditioning, where behaviors are modified based on the consequences they produce.
Moreover, Q-learning’s emphasis on the value of future rewards can be related to how humans and animals weigh the long-term benefits of their actions against immediate gratifications, a process deeply studied in cognitive psychology.
In summary, Q-learning provides a framework for understanding decision-making and learning in both artificial agents and biological organisms, offering insights into how complex behaviors can emerge from the pursuit of maximizing rewards over time.
Model-based RL
- Markov Decision Process (MDP)
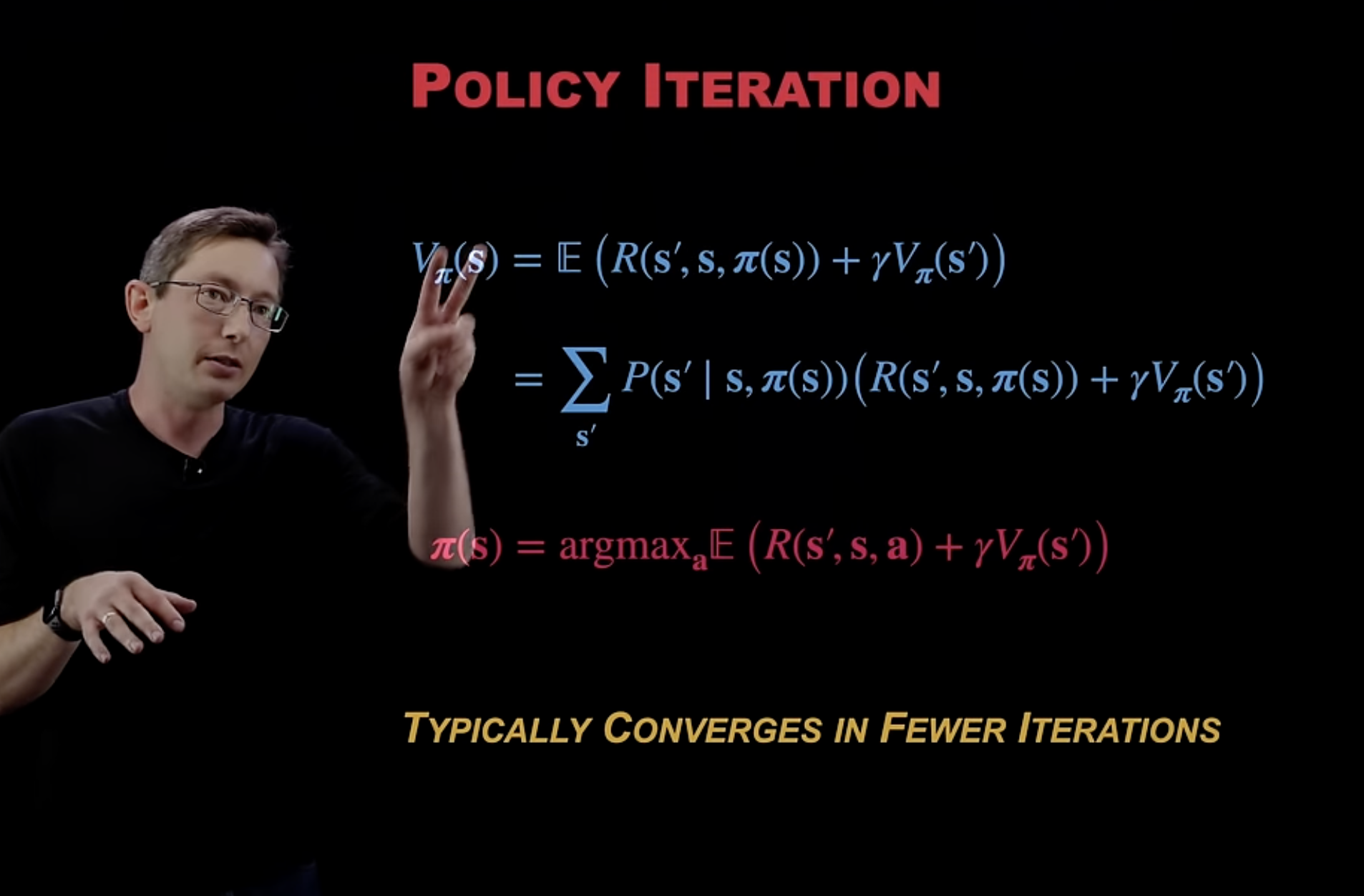
- Dynamic programming breaks down policies into subproblems which makes it easier to compute (you cannot know all possible states)
- γ makes it an exponentially decaying reward function
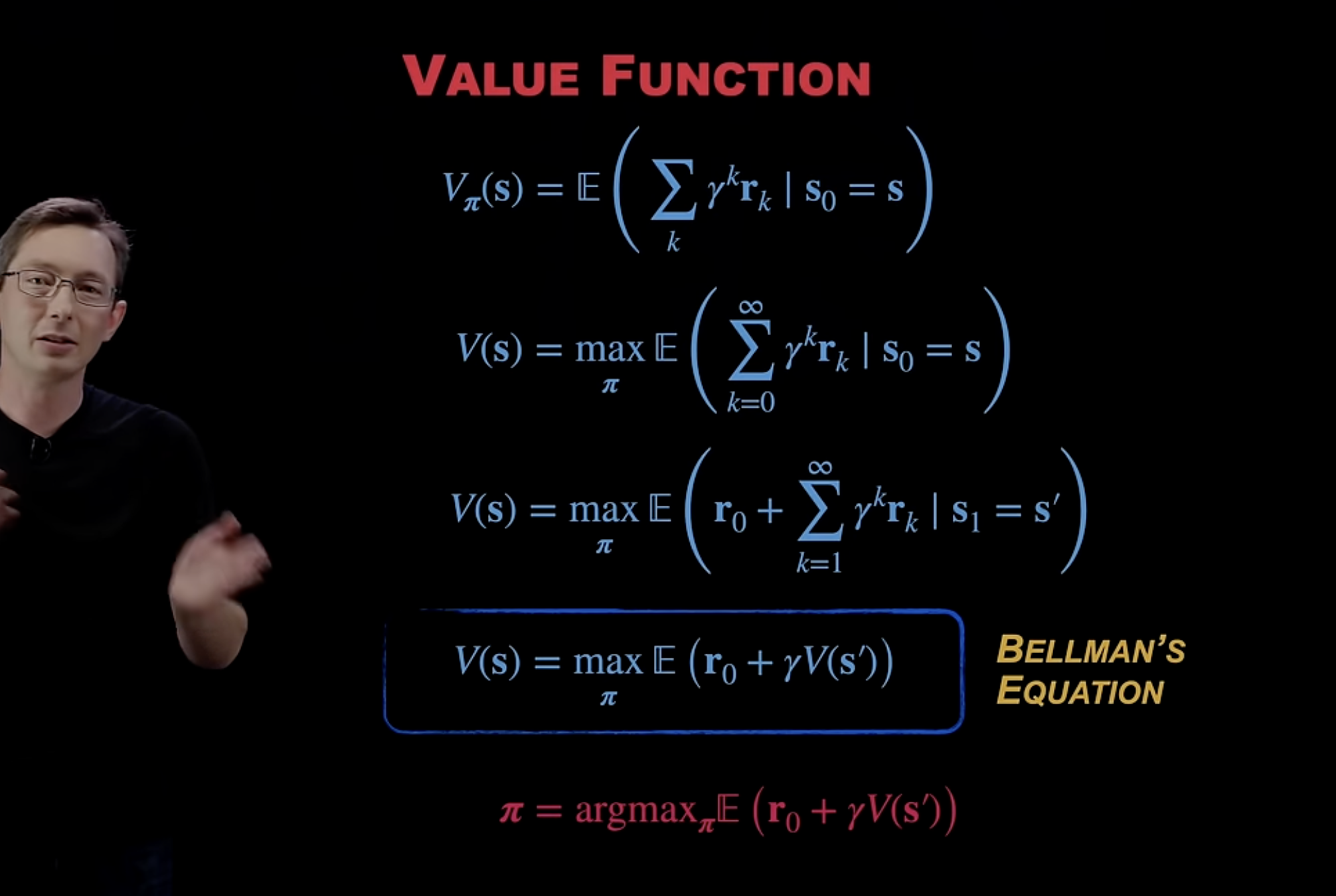
- you can always extract a policy from a value function
- Top-Down approach: list all possible subproblems and solve all of them
- brute force solving an entire thing, chess is too big for that (Bellman’s equation)
- closely related to divide-and-conquer methods (problems rely on being not overlapping and recursive)
- Bottom-Up approach: start with the smallest subproblems and work back to the optimal solution.
- from every winning configuration, optimize one step back. What was the best move that got me there?
- like AlphaGo
- Nonlinear Dynamics
Model-free RL
- Gradient-free
- games like chess or GO
- Off-Policy: Q-Learning
- On Policy: SARSA
- Gradient-based
- usually fastest and most efficient
Difference between model-based and model-free RL
chatbot
Model-based and model-free reinforcement learning (RL) are two fundamental approaches used to solve decision-making problems, and they differ primarily in how they interact with the environment and plan for future actions:
Model-Based Reinforcement Learning
-
Definition:
- Model-based RL involves building a model of the environment. This model is used to simulate the environment’s dynamics, including state transitions and rewards.
-
How It Works:
- The agent learns an approximate model of the environment’s behavior, which may include the transition probabilities between states and the reward function.
- Once the model is established, the agent can plan by simulating future trajectories within this model to decide on the best action.
-
Advantages:
- Sample Efficiency: By using the model to simulate experiences, model-based RL often requires fewer interactions with the actual environment to learn effective policies.
- Planning Capability: The model allows for foresight and planning, enabling the agent to consider long-term consequences of actions.
-
Disadvantages:
- Complexity: Building and maintaining an accurate model can be computationally expensive and complex.
- Model Errors: Errors in the model can lead to suboptimal policies, as decisions are based on inaccurate simulations.
Model-Free Reinforcement Learning
-
Definition:
- Model-free RL directly learns a policy or value function from interactions with the environment without explicitly constructing a model of the environment.
-
How It Works:
- The agent learns to estimate values (either state-values or action-values, like in Q-learning) or directly map states to actions (as in policy gradient methods) based on rewards received from the environment.
- Learning is typically done through temporal difference methods or policy gradients.
-
Advantages:
- Simplicity: There is no need to model the environment, which simplifies the process and reduces computational overhead.
- Robustness: The absence of a model means there’s no dependence on model accuracy; learning relies on actual rewards and transitions observed.
-
Disadvantages:
- Sample Inefficiency: Learning from each interaction without simulating future events often requires many iterations to converge to an optimal policy.
- Lack of Planning: Without a model, the agent cannot plan long-term strategies based on hypothetical scenarios.
Summary
- Model-based RL is best when environment simulations are feasible and can provide insights into efficient planning, though it requires complex modeling.
- Model-free RL is advantageous when simplicity and robustness are key, despite needing more interactions to learn effectively due to its lack of explicit planning capabilities.
Markov Decision Process’s role in RL
chatbot
Yes, Markov Decision Processes (MDPs) play a central role in both model-based and model-free reinforcement learning (RL). MDPs provide the mathematical framework used to describe the environment in which an RL agent operates. Here’s how MDPs are involved:
Markov Decision Processes (MDPs)
- MDP Components: An MDP is defined by a tuple (S,A,P,R,γ), where:
- S is the set of states in the environment.
- A is the set of possible actions the agent can take.
- P is the state transition probability P(s′∣s,a), which defines the probability of moving to state s′ from state s by taking action a.
- R is the reward function R(s,a,s′), which provides the reward received after transitioning from state s to state s′ via action a.
- γ is the discount factor, determining the importance of future rewards.
Role of MDPs in Reinforcement Learning
-
Model-Based RL:
- In model-based RL, the goal is often to learn an approximate model of the MDP, which includes understanding or estimating both the transition probabilities (P) and the reward function (R).
- Once the model is acquired, planning can be done using algorithms such as dynamic programming or Monte Carlo methods, leveraging the MDP framework to evaluate potential sequences of actions.
-
Model-Free RL:
- Even without explicitly modeling P and R, model-free RL approaches seek to learn a policy or value function that effectively helps the agent navigate the MDP.
- Methods like Q-learning and SARSA focus on learning action-value functions that represent expected returns for state-action pairs within the MDP, without needing to directly estimate the model parameters.
- The concept of an MDP is used implicitly since the value functions learned are based on assumptions consistent with the MDP framework (e.g., future states depend only on the current state and action).
Importance of MDPs
- MDPs provide the formal grounding for understanding how decisions lead to different outcomes and rewards over time. They serve as the basis for defining how environments are structured in RL.
- The objective for both model-based and model-free methods is to find a policy that maximizes cumulative rewards within the MDP structure, whether through explicit models or direct interactions with the environment.
In conclusion, MDPs are foundational to RL. They offer the structure necessary for agents to learn optimal policies by understanding the dynamics of the environment, whether by modeling it explicitly or learning directly through experience.
Where RL is used today
After a long “winter” (1990s–2015), RL became central to AI in the last decade:
- AlphaGo (2016), AlphaZero (2017), MuZero (2019) — DeepMind’s superhuman game players. AlphaGo beat Lee Sedol, AlphaZero learned chess/shogi/Go from scratch in hours.
- AlphaFold 2 (DeepMind, 2020) — used RL for the structure module that selects protein conformations.
- ChatGPT / Claude / Gemini RLHF — the “R” in InstructGPT (2022) was PPO on a learned reward model from human preferences. RL is what made LLMs actually helpful instead of just text-completers.
- Robotic locomotion — Boston Dynamics, Tesla Bot, OpenAI’s robotic hand (Rubik’s cube solver, 2019), ANYmal mountain hiking (ETH 2024).
- Autonomous warehouse robots — Amazon’s Kiva fleets, Waymo simulations train autonomous driving policies in RL environments.
- Content recommendation — TikTok’s For You feed, YouTube’s recommendation, Spotify’s discovery all use contextual bandits / RL formulations.
- Datacenter cooling — Google reduced cooling energy by 40 % using RL (2016) — billions saved.
- Trading & market making — Citadel, Two Sigma use RL for execution policies and market making.
- Compiler optimization — Meta’s CompilerGym, Google’s MLIR use RL to search for better code optimizations.
Where RL is being challenged — and by what
| Application | Was pure RL, now … | Why |
|---|---|---|
| LLM alignment | DPO (Direct Preference Optimization, 2023) | DPO skips the reward-model step → simpler, more stable than PPO-based RLHF |
| Robotic policies (some tasks) | Imitation Learning, Diffusion Policy | Demonstrations are easier to gather than reward functions; diffusion-based policies generalize well |
| Game AI development | LLM-driven agents (e.g. SIMA, Voyager) | Pretrained LLMs as policy backbones — less environment-specific training needed |
| Planning in deterministic worlds | Classical search + heuristics, MCTS | When the model is known, search is more sample-efficient than RL |
| Reward design problems | RLHF, IRL, Constitutional AI | Specifying rewards is hard → learn them from humans or principles |
Bottom line: RL hasn’t been “replaced” — it’s been integrated into hybrid pipelines (RLHF, RL fine-tuning on top of pretrained models). Pure RL from scratch is rare; RL on top of supervised/self-supervised pretraining is the norm.
see also
Type:
Tags:
Status:
Location:
Created: 16-12-24 16:30
611 📠Machine Learning